
Aurora City Schools - FTC Robotics Team Blog
Saturday, December 31, 2011
December 31st meeting
Today I made refined our joystick control system. I made the tank drive a lot better by adding a refined equation (JoyValue / 127 * 100 = Motor Value) that scales the joystick value of -127 to 127 into -100 to 100. I used the D-pad to make the elbow work a lot better, so i can refine it degree by degree. Tyler worked on the auto program to make it work better. It can now get the bowling ball but he is still working on getting the bowling captured.
Monday, December 19, 2011
12/19/11 Meeting
At our meeting we did many things. I did refined the joystick program to make expectational output. The equation is
MotorOutout = ( joystickValue ^ 2 / max joystickValue ^ 2)
MotorOutout = ( joystickValue ^ 2 / max joystickValue ^ 2)
Sunday, December 18, 2011
Scrimmage Results
Congratulations Team on a great scrimmage. 8 FTC teams participated and all were high school except J2IT. We scored 2nd place overall and had the single highest scoring game of the day. We learned some great strategy and also some got some great ideas from the other teams to help finish our robot for the January competition. Thanks Hudson for hosting this great event.
Saturday, December 10, 2011
Pre-Scrimage Meeting
Today our team was preparing for the scrimage at Hudson High School. I feel that we are well prepared even though our scisor lift has to be operated by the arm and not an independant motor. Today Jaret and Tyler worked on the programs revising and preparing them for the compotition. Ian and I both worked on tightening screws and packing materials for the compotion. I think that we will do well against the other high school teams, but I do not think we will come in forst for this scrimage compotion.
Sunday, December 4, 2011
December 3, 2011 Practice
In our recent practice, we completed a lot of work with the autonomous program and making bug fixes in the joystick-control program. I added precise turning and driving, and I am planning on incorporating the infared sensor in a more precise method. Jaret and Ian started to incorporate dual joysticks, as they are used in that fashion in the competition. Jared worked on catalog the robot part, part by part.
Monday, November 28, 2011
November 28, 2011 Meeting
Today Jaret worked on the programming for the arm.He made good progress with that. Jared worked on fixing the kinks on the robot. Tyler started programming for the autonomous mode. He is making 2 programs, one for if we are the red team and one for if we are on the blue team. Today ian worked with the lift and he tried to make a triggering system. He is still trying to figure it out.
Saturday, November 26, 2011
November 26, 2011 Practice
Today, Ian eas not present, but we still accomplished a large fleet of innovations. Jared worked on finalizing the arm, even though there is still work to be done. As I encountered problems with my program, Jaret debugged the code and spent the remainder of the practice simplifing the code. Wheras after Jaret took over programming, I started the proccess of cataloging the robot parts. The current count is posted below (not complete):
43 Cm Channel - 2
29 Cm Channel - 12
Motor - 4
Servo - 2
4.75 Cm Radius Wheel - 4
5 Cm Radius Gear - 3
2 Cm Radius Gear - 7
3 Cm Radius Gear - 5
Servo Controller - 1
Motor Controller - 2
43 Cm Channel - 2
29 Cm Channel - 12
Motor - 4
Servo - 2
4.75 Cm Radius Wheel - 4
5 Cm Radius Gear - 3
2 Cm Radius Gear - 7
3 Cm Radius Gear - 5
Servo Controller - 1
Motor Controller - 2
Thursday, November 17, 2011
Robot Photos

The "Guts"

Our new 4.2 wheel drive.

Ian D. working on mounting the scissor lift.

Jared R. fixing the transmission's gears.

Tyler T. mounting the Infrared Sensor.

An early test of the articulated arm.

The arm looks cool even if it didn't work.

The new scissor lift.
Saturday, November 12, 2011
November 12, 2011 Practice
Today we woked mostly on our robot design. We did some work with our arm by attatching and reworking with the design, like working with weight-related issues. The weight of the servo could not lift the basket. We also started our lift system by attatching it to the robot. We referanced our designs to online videos with Jaret leading on the innovation. I worked on programming the arm autonomously and with the joystick. Today was considerably productive.
Tuesday, November 8, 2011
Monday, November 7, 2011
November 11, 2011 Meeting
Today Tyler started working on the autonomous program for the competion. He was working with the infared sensor to align the robot in the playing field no matter what color we are. Today Jared finished attaching the plastic wheel guards that aid in protecting the wheels.He spent the remaining time preping the robot for attaching the claw mechinism. Ian continued working on the scissor lift. He made a track for the bottom to follow and added a support beam through the center. Jaret, unfortunately, was not present at today's meeting.
Saturday, November 5, 2011
November 5, 2011 Practice
As our practice began, Ian and Jared began with building as usual. Wheras I was programming and Jaret was working on our shirt design.
Jared and Ian both worked on a wheel guard system, until Ian branced off and worked on a lift system for the crate.
After I encountered some joystick issues while programming, Jaret took over with his knowledge of the joystick. He did not acheive much with the program.
After my programming was taken ovey by Jaret two-thirds into the meeting, I wrapped up Jaret's shirt design using some photoshop techniques I know.
In conclusion, our meeting was mostly productive and we are looking forward
to our future meetings where we can perfect work we did today.
Saturday, October 29, 2011
Meeting Review 10/29/11
Today was a very productive meeting. I (Jared) worked on the hand again and might have finally finished on the comlpete desighn including the newest desighn change the magnetic sensor.Tyler finally completed the stall program and is now experimenting with using the encoders. Jaret and Ian worked on our future plow and fixed other minor flaws in our robot. Jaret and Tyler also tried programing our arm but they decided to do something else instead. Today we had a very productive meeting and I think that we are now steadying to a fairly good pace.
Saturday, October 22, 2011
october 22, 2011 practice
Today we made some good progress. Jared worked on his claw and came close to finishing it. Tyler made a turning program that because of our new wheel system could turn the robot in a very confined space. Ian worked on and finished the new wheels that include 4 wheel drive with Jaret's help. Jaret continued with the joystick. The joystick is working so much better because of the 4 wheel drive system.Videos that show what we can do with four wheel drive are above.
Saturday, October 15, 2011
October 15th meating
Today we did some things. Jared worked on the claw and it seemed he made a little bit of progress. I worked on the joystick and got it to work better. And Tyler worked on an inferred program hat seems to work really well and is very good.
Saturday, October 8, 2011
October 8, 2011 Practice
Today, Jaret and I dove into the new sensors, magnetic and infared. We got both sensors working in a basic manner, and I am waiting to test a more advanced IR beacon tracker. A video with the concept is on the left side. We also mounted a new "device" to the robot.
Monday, October 3, 2011
October 3, 2011 Practice
Today, we worked with motors to create a stop on stall program due to burning out two motors. We finnaly have a system that stops the motors before they burn. We just need to spend five minutes to incorporate this into our programs, and then we will save the "lives" of many motors.
A picture of our stall test system is below.
A picture of our stall test system is below.
Saturday, October 1, 2011
October 1, 2011 Practice
What We Did:
Today we added a support system to our robotic arm. We set up the final wiring and gave the arm some movement.
What We Learned:
Our team had a scary experience of our arm's motor almost burning out.
The odor of smoke was emmiting from our motor.Next time, we need to be more careful with tge arm's power and the control of "new" devices.
Today we added a support system to our robotic arm. We set up the final wiring and gave the arm some movement.
What We Learned:
Our team had a scary experience of our arm's motor almost burning out.
The odor of smoke was emmiting from our motor.Next time, we need to be more careful with tge arm's power and the control of "new" devices.
Monday, September 26, 2011
September 26, 2011 Practice
Today, Jared and Ian were building their attachments of an elevator and the arm. I helped attach the arm and began programming for arm usage in the autonomous code. We all watched Jaret debug his joystick program "JoyOS". We made a great deal of progress today.
Saturday, September 24, 2011
August 26th Meating
Today we worked on a lot of stuff. Jared worked on making an arm. Tyler worked on the automounus code and I drove the robot with the joystick program. Thats pretty much all we did on this meating!
Wednesday, September 21, 2011
Mark your calendars...
J2IT is now offically registered to compete in the FTC OH Regional Qualifying Tournament on January 13-14, 2012
Robot/Software Inspections Friday, January 13, 6:00 – 8:00 pm
Tournament Saturday, January 14, 7:30 am
Tournament Saturday, January 14, 7:30 am
Location
Cuyahoga Community College
Eastern Campus
4250 Richmond Road
Highland Hills, OH 44122
Eastern Campus
4250 Richmond Road
Highland Hills, OH 44122
Monday, September 19, 2011
September 19, 2011 Practice
 |
| The interior of our robot, or as Jared calls it, the tech package. |
We did get to get an atonomous program to use a simple driving pattern. I am planning on adding some simple behind-the-scenes functions that influence major functions. We will also add sensor inputs.
Jaret also started his joystick and got his program to move forward and stop the wheels. We had a very productive meeting today.
Saturday, September 17, 2011
September 17, 2011 Practice
 |
| Jaret working with the new joystick |
Some of the changes included re-creating the motor an servo controllers, along with the very important battery pack. We also started creating new joystick program using our brand-new joysticks.
New Motor and Servo Controller Mounts


Saturday, September 10, 2011
September 10, 2011 Practice
Today, we watched a live stream of the challenge being released. We watched live Q&A and the challenge video. We also enjoyed food while watching the broadcast.
After the live session, we went back to work with braistorming ideas and planning the next meeting. We got a few good ideas flowing for working with the objects and containers.
| The logo for this years's challenge. |
After the live session, we went back to work with braistorming ideas and planning the next meeting. We got a few good ideas flowing for working with the objects and containers.
Saturday, August 27, 2011
August 27, 2011 Practice
 |
| Here is the gear system on the ball collector. |
 |
| We finally made a reliable NXT mound! |
On the other hand. I finally made a stable and accessible NXT mount. It also provides easy access to the NXT brick itself. We also moved some components to make room for our new addition of an improved ball collector.
Today was very productive and we are planning on adding on and possibly completing the ball collection device on our next meeting. We also anticipate the release of the actual challenge, on September 10th. I was very impressed by how productive today's meeting was.
Saturday, August 20, 2011
june 14th meeting
Jaret and I were the only one at the meeting i worked on a acceleration sensor controller its pretty cool. Jaret was working on a random number generator and a X-box remote controller.
August 20th Practice
Today Jaret, Tyler, and I worked on a new challenge which was to collect golf balls and then release them in a determined place. Today though we mainly built the attachment necsisary for the challenge and programmed tests for the different motors. We also are playing with the mount for the NXT which we still can not figure out how we want to mount it. Over all the practice was very productive.
Saturday, August 13, 2011
August 13, 2011 Practice
Today we were all here, except for Ian. The goal for today was to get the robot into a position where it could drive around. Jared and Jaret had to leave early, so I added a servo.
The servo operated a channel with a object enclosed. The final program was simple and had the object get dumped off the robot. I have included the code from the dumping program below:
#pragma config(Hubs, S1, HTMotor, HTServo, none, none)
#pragma config(Motor, mtr_S1_C1_1, Wheel_Left, tmotorNormal, openLoop, reversed)
#pragma config(Motor, mtr_S1_C1_2, Wheel_Right, tmotorNormal, openLoop)
#pragma config(Servo, srvo_S1_C2_1, Experimental, tServoStandard)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
int Universal_Speed = 25;
servo[Experimental] = 0;
motor[Wheel_Left] = Universal_Speed;
motor[Wheel_Right] = Universal_Speed;
wait1Msec(2000);
motor[Wheel_Left] = 0;
motor[Wheel_Right] = 0;
servo[Experimental] = 90;
wait1Msec(2000);
servo[Experimental] = 0;
wait1Msec(2000);
}
 |
| Here is our final robot from today. You can see my servo attachment on top. |
The servo operated a channel with a object enclosed. The final program was simple and had the object get dumped off the robot. I have included the code from the dumping program below:
#pragma config(Hubs, S1, HTMotor, HTServo, none, none)
#pragma config(Motor, mtr_S1_C1_1, Wheel_Left, tmotorNormal, openLoop, reversed)
#pragma config(Motor, mtr_S1_C1_2, Wheel_Right, tmotorNormal, openLoop)
#pragma config(Servo, srvo_S1_C2_1, Experimental, tServoStandard)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
int Universal_Speed = 25;
servo[Experimental] = 0;
motor[Wheel_Left] = Universal_Speed;
motor[Wheel_Right] = Universal_Speed;
wait1Msec(2000);
motor[Wheel_Left] = 0;
motor[Wheel_Right] = 0;
servo[Experimental] = 90;
wait1Msec(2000);
servo[Experimental] = 0;
wait1Msec(2000);
}
Saturday, August 6, 2011
August 6, 2011 Practice
Today we started our meeting with a discussion on our current robots and how to combine the components to make a powerful machine. Ian and I kept our electronic components and Jaret kept the wheel system.
Our new robot currently has only wheels. Next week we are adding the electronic components, including the NXT and TETRIX controllers. We had many debates over the robot's design, and now we are on to creating an amazing machine that will work for our practice before the challenge is released.
Our new robot currently has only wheels. Next week we are adding the electronic components, including the NXT and TETRIX controllers. We had many debates over the robot's design, and now we are on to creating an amazing machine that will work for our practice before the challenge is released.
Our Old Robot Designs
 |
| Mine and Ian's robot. |
 |
| Jaret's robot. |
Saturday, July 30, 2011
July 30, 2011 Practice
Today we finished our TETRIX creations from last week. Jared was on vacation so Jaret was working alone. After our countless minutes of constructing, we started programming our robots. We started with making the robots go forward, which was all we could do with our starter-robots.
Near the end of the practice, we had a mini sumo challenge Jaret has been dreaming of since day one. The robot that could push the other one out of an area. Jaret won the competition while his robot played a "battle tone". Below is a video from the challange.
Saturday, July 16, 2011
July 16, 2011 Practice
 |
| Ian and I work on our robotic creation featuring "brains". |
 |
| Jared and Jaret worked on a robotic creation featuring mechanics and "sumo skills". |
Saturday, July 9, 2011
July 9, 2011 Practice
 |
| Our new robot design with treads. |
#pragma config(Sensor, S2, FloorColor, sensorCOLORFULL)
#pragma config(Motor, motorB, RightWheel, tmotorNormal, PIDControl, encoder)
#pragma config(Motor, motorC, LeftWheel, tmotorNormal, PIDControl, encoder)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
void color_read();
void white_task(int forward_speed);
void black_task(int reverse_speed);
int read_output;
task main()
{
int universal_speed = 25;
while(1 == 1)
{
color_read();
switch(read_output)
{
case 6 :
white_task(universal_speed);
break;
case 1 :
black_task(universal_speed);
break;
}
}
}
void color_read()
{
bool value_ready = false;
while(!value_ready)
{
int A = SensorValue[FloorColor];
int B = SensorValue[FloorColor];
int C = SensorValue[FloorColor];
if(A == B && B == C && C == A)
{
read_output = C;
value_ready = true;
}
else
{
value_ready = false;
}
}
}
void white_task(int forward_speed)
{
motor[RightWheel] = forward_speed;
motor[LeftWheel] = forward_speed;
}
void black_task(int reverse_speed)
{
motor[RightWheel] = 0 - reverse_speed;
motor[LeftWheel] = 0 - reverse_speed;
}
Tuesday, June 28, 2011
June 28, 2011 Practice
Today was a small meeting with only Jared and I, due to Ian and Jaret both taking family vacations. Together, we accomplished creating a claw and giving the robot a better rear "wheel". We also discussed ideas for our claw and robot. In the programming department, I made a program that starts in a box and travels to the other end than turns around. To help with motors, I created a global variable for motor offset. In my opinion, this was one of our most successful meetings yet.
Here is a small sample of code from the program that turns at line (I did not define the functions):
task main()
{
int universal_speed = 50;
int light_threshold = 45;
straight(universal_speed, false);
wait1Msec(1250);
straight(universal_speed, true);
while(1 == 1)
{
while(SensorValue[Light_R] >= light_threshold)
{
straight(universal_speed, false);
}
straight(universal_speed, true);
turn_r(universal_speed, light_threshold);
}
}
Here is a small sample of code from the program that turns at line (I did not define the functions):
task main()
{
int universal_speed = 50;
int light_threshold = 45;
straight(universal_speed, false);
wait1Msec(1250);
straight(universal_speed, true);
while(1 == 1)
{
while(SensorValue[Light_R] >= light_threshold)
{
straight(universal_speed, false);
}
straight(universal_speed, true);
turn_r(universal_speed, light_threshold);
}
}
Tuesday, June 21, 2011
June 21 Meeting
Today we practiced using the joystick to control the robot for the first time. We also started to explore the gyroscopic sensor and programing with it. Tyler also tried to follow a course by detecting lines. Overall a very good practice.
:)
:)
Saturday, June 11, 2011
New way to practice your RobotC at home
Thanks to Carnegie Mellon and The Computer Science Social Network (cs2n.org) we've got a great new software that you can download for free at home. I've tested some of our programs in the simulator and its pretty realistic. It will let you use the RobotC at home and simulate the Lego robot on your computer. You can download the software HERE.
http://dl.dropbox.com/u/25222170/RVW_NXT_TechAlpha.exe
For more information on the H99 NXT Simulator for RobotC try these links:
http://www.cs2n.org/h99
http://www.cs2n.org/h99/learn_lego
Try it out and let me know if what you think.
Next Practice: Tuesday June 14th at 4:00 PM,
Terry
http://dl.dropbox.com/u/25222170/RVW_NXT_TechAlpha.exe
For more information on the H99 NXT Simulator for RobotC try these links:
http://www.cs2n.org/h99
http://www.cs2n.org/h99/learn_lego
Try it out and let me know if what you think.
Next Practice: Tuesday June 14th at 4:00 PM,
Terry
Tuesday, June 7, 2011
Practice Tuesday June 7th 2011
Today we did things.... THINGS, not just any little "things". Big, no BIG things, we made a fast line following program that could line follow with 2 light sensors. It wass very fast and further reinforced my skills. We learned about gyro and acceleratorion sensors. We had to also attached a second light sensor and attached a gyro and acc. sensors. We sadly took down our sound and Ultra-Sonic sensor. :''(

Peace OUT

Peace OUT
Monday, June 6, 2011
Meeting Schedule for June 2011
Just a quick note about team practice next week. There is a conflict with scouts and our scheduled FTC meeting next Saturday.
After discussion with parents, it sounds like Tuesdays (4pm-6pm) will be a good backup day for weeks when Saturday won’t work. Through the summer, if there is a conflict with 2 or more of the team, just let me know and we will plan to meet the Tuesday before our regularly scheduled meeting.
- Practice: Tue June7th
- No Practice Saturday June 11th (Scouts)
- Practice: Tue June 14th
- No Practice Saturday June 18th (Tyler/Ian out of town)
- Resume Regular Practice: Saturday June 25th
Please let me know if you have any questions or concerns.
Saturday, June 4, 2011
June 4, 2011 Practice
 |
| Ian, Tyler, Jaret discussing a flow chart. Flowcharting is a necessary skill in the FTC. |
In this practice session, we worked on tasks like counting a total number of lines and line following with directional commands. Ian and Jaret worked on additional challenges and Jared was getting caught up after his baseball games. He was working on line following. I accomplished the main goals with support from the team. We all fixed the issues from practice two and quickly edited the program to get everything working. We also improved our note-taking skills by learning flowcharting. Our meeting would be called a good use of time by all team members and coaches. We are strongly looking forward to really getting to work with TETRIX sensors and servos.
 |
| Jared debugging code. |
Friday, June 3, 2011
Flowchart

I choose to use a "System" flowchart. You bassically use a diffrent shape for each command. This allows for easier reading and for good uniformed organization. They can be used for different purposes ie. solving a problem or designing a procces. In some cases, such as me, it may be easier to understand a flowchart than a program.
Monday, May 30, 2011
May 28 practice lessons learned?
I apologize guys, I should have checked the robot after the training meeting last Saturday. I didn't think anyone used it so I didn't worry about it.
Were you able to get the robot to work at all? What kind of troubleshooting did you try? What do we do if this happens on game-day? Should we invest in 2 robots if the team raises enough money? What do you think caused this problem? Do you think this kind of thing happens to professional engineers? If so, how do you think they handle it?
Again I'm sorry it didn't go as planned, but I'm glad you worked together to try and fix the problem. As much as I hate these kinds of problems - they can and do happen in all kinds of jobs. They also can teach us alot about our selves and our team. If you learned something about yourself, share it.
Thanks again to Mr. Ruehr for filling in while I was geeking-out in Baltimore. See you Saturday June 4th.
- Terry
Were you able to get the robot to work at all? What kind of troubleshooting did you try? What do we do if this happens on game-day? Should we invest in 2 robots if the team raises enough money? What do you think caused this problem? Do you think this kind of thing happens to professional engineers? If so, how do you think they handle it?
Again I'm sorry it didn't go as planned, but I'm glad you worked together to try and fix the problem. As much as I hate these kinds of problems - they can and do happen in all kinds of jobs. They also can teach us alot about our selves and our team. If you learned something about yourself, share it.
Thanks again to Mr. Ruehr for filling in while I was geeking-out in Baltimore. See you Saturday June 4th.
- Terry
Sunday, May 29, 2011
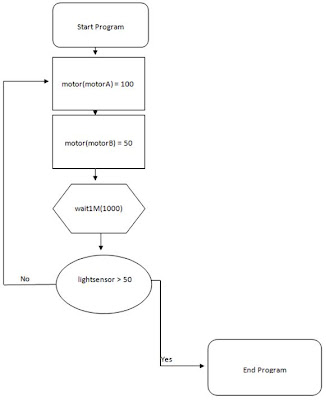
Homework
I chose to use a program flowchart. I chose this kind of flowchart because a program flowchart demonstrates how a program works within a system. These flowcharts show any and all user-interaction pathways by using boxes and arrows. Program charts can be large and complex. However, they are useful for mapping an entire program. The example I made would have the robot turn one way until it saw a dark line then it would stop.

Saturday, May 28, 2011
Second Team Meeting - May 28, 2011
At a team meeting with only Jared and I, we experienced a problem with the robot. Our goal was to recover the robot, but we failed. Due to this dismaying discovery, we just programmed and achieved all of the line following program and got a decent start with the "pill push" line task.
may 28th practice
this practice we did not get much acomplished because we were trying to figure out what was wrong with the robot because it would not start up and kept making a cliking sound we needed some help for this practice.
Sunday, May 22, 2011
my home work
I will present the rest of my homework at our next meeting it's not really a flow chart but it is similar enough
superjor's goals
I want to take F.l.l. one step further and get used to real programing code another one of my goals this year is to have fun which is the whole point of this competition
Friday, May 20, 2011
Tyler's Homework, May 20

The type of flowchart I researched was a system flowchart. This would be effective with our program mapping due to listing inputs and outputs with symbols, as well as data flow. My informtation source is eHow. Click here to veiw the specific page for the information.
Tuesday, May 17, 2011
First Team Meeting - May 14th 2011

Jared R., Tyler T., Jaret S. Discuss Team Goals

Jaret S. working with RobotC

Tyler T. working with sensors in RobotC
Monday, May 16, 2011
Subscribe to:
Comments (Atom)